数值法求解最优控制问题(三)——多重打靶法
写在前面
在数值法求解最优控制问题(二)——打靶法中介绍了单次打靶法的原理,本篇介绍多重打靶法(Multiple Shooting Method,MSM)。
多重打靶法与单次打靶法都是将控制变量在时间区间内离散,再在每个子时间区间中使用多项式函数进行近似。但两者区别之处在于,多重打靶法把每个子时间区间内状态变量初始值作为待优化参数,分段求解状态微分方程,并设置每段时间区间的连续性条件约束。
多重打靶法
下面介绍多重打靶法的原理,并根据数值法求解最优控制问题(一)——梯度法的算例,给出matlab代码。
多重打靶法的核心思想是:将连续的控制向量在离散时间网格上参数化;同时将状态向量在每个时间子区间上的初始值也作为新的自由度,即同样作为待优化的参数,独立求解每个子区间的状态微分方程组,然后引入匹配条件作为等式约束以保证状态轨迹的连续性。这样,原问题被转化为一个非线性规划(NonLinear Programming,NLP)问题进行求解。
多重打靶法的原理是:在算法初始阶段,对于给定的待优化参数值,分别计算出目标函数值和状态变量曲线。随着算法迭代,状态曲线在连续性条件约束下趋于连续,目标函数趋于最优值。
首先,在时间区间 $[t_0,t_f]$ 内划分 $N+1$ 个子时间区间 $I_k$,为:
\[\begin{matrix} I_k = [t_{k-1},t_k], \quad (k=1,2,\dots,N+1), \\ t_0 \le t_1 \le \dots \le t_k \le \dots \le t_{N-1} \le t_{N+1} = t_f, \end{matrix}\]式中,$t_k$ 为时间节点,是一个固定值。
下面开始离散控制量。
假设控制量 $\boldsymbol{u}(t) \in \mathbb{R}^{n_u}$,第 $i$ 个分量为 $u_i(t)(i=1,2,\dots,n_u)$,则其数学描述为:
\[u_i(t) = \sum_{k=1}^{N} u_i^k(t) \chi_k(t),\]式中,$u_i^k(t)$ 为控制分量 $u_i(t)$ 在时间区间 $I_k$ 内的值,$\chi_k(t)$ 为单位开关函数,为
\[\chi_k(t) = \left \{ \begin{matrix} 1, \quad t \in [t_{k-1},t_k], \\ 0, \quad t \notin [t_{k-1},t_k]. \end{matrix} \right.\]$u_i^k(t)$ 可近似表示为:
\[u_i^k(t) \approx \sum_{r=1}^{M+1} \sigma_{ir}^k [\phi_{ir}^k(t)]^M,\]式中,$\phi_r(t)$ 是基函数, $M$ 是基函数的阶次, $\sigma_r$ 是线性组合系数,即控制参数。根据 $\phi_r(t)$ 和 $M$ 的选择不同,$\boldsymbol{u}(t)$ 有多种参数化表达形式,例如有分段常数近似、分段线性近似、分段抛物线近似和分段光滑样条函数近似等形式。
控制量被离散后,下面需要将状态变量在相同时间网格上进行打靶。
引入辅助向量 $\boldsymbol{s}=[\boldsymbol{s}_1^{\rm T},\boldsymbol{s}_2^{\rm T},\dots,\boldsymbol{s}_N^{\rm T}]$,分量 $s_k(k=1,2,\dots,N)$ 为状态变量 $\boldsymbol{x} \in \mathbb{R}^{n_x}$ 在每个子时间区间上的初始值,为:
\[\boldsymbol{s}_k = \boldsymbol{x}_0^k = [x_{10}^k,x_{20}^k,\dots,x_{j0}^k,\dots,x_{n_x 0}^k].\]上式中,各状态变量在打靶区间内是彼此不相关的,动态微分方程可以作为初值问题(Initial Value Problem,IVP)独立求解,为:
\[\begin{matrix} \boldsymbol{\dot x}_k(t) = \boldsymbol{f}[\boldsymbol{\sigma}_k,\boldsymbol{x}_k(t),t], \quad t \in [t_{k-1},t_k], \\ \boldsymbol{x}_k(t_k) = \boldsymbol{s}_k. \end{matrix}\]为了保证状态变量在整个时间域上的连续性,引入连续性约束条件作为等式约束,为:
\[\boldsymbol{x}_k(t_{k+1}) - \boldsymbol{x}_{k+1} = 0.\]由此,最优控制问题被转化为确定控制参数 $\sigma$ 和 辅助参数 $\boldsymbol{s}$ 的有限维 NLP 问题,为
\[\begin{aligned} &\min_{\sigma,s} \quad J = \Phi_0[\boldsymbol{x}(t_f)] + \sum_{k=1}^{N+1} \int_{t_{k-1}}^{t_k} L_0[t,\boldsymbol{x}_k(t),\boldsymbol{\sigma}_k] \text{d}t, \\ &\text{s.t.} \\ &\boldsymbol{\dot x}_k(t) = \sum_{k=1}^{N+1} \boldsymbol{f}[\boldsymbol{\sigma}_k,\boldsymbol{x}_k(t),t], \\ &\boldsymbol{x}_k(t_k) = \boldsymbol{s}_k, \\ &\Phi_m[\boldsymbol{x}(t_f)] + \sum_{k=1}^{N+1} \int_{t{k-1}}^{t_k} L_m[t,\boldsymbol{x}_k(t),\boldsymbol{\sigma}_k]\text{d}t = \boldsymbol{0},\quad m = 1,2,\dots,m_1, \\ &\Phi_m[\boldsymbol{x}(t_f)] + \sum_{k=1}^{N+1} \int_{t{k-1}}^{t_k} L_m[t,\boldsymbol{x}_k(t),\boldsymbol{\sigma}_k]\text{d}t \le \boldsymbol{0},\quad m = m_1+1,\dots,m_1+m_2, \\ &\boldsymbol{x}_k(t_{k+1}) - \boldsymbol{s}_{k+1} = 0, \\ &\boldsymbol{u}_L \le \boldsymbol{\sigma} \le \boldsymbol{u}_U, \\ &t_{k-1} \le t \le t_k, \quad k = 1,2,\dots,N+1. \end{aligned}\]算法步骤
- 确定最优控制问题的离散点数、起止时间、子时间区间段数、状态变量初值、控制变量初值;
- 计算状态变量数量、控制变量数量和约束条件数量:
- 状态变量数量 = 状态变量数量 * 离散点数,
- 控制变量数量 = 控制变量维度 * 离散点数,
- 约束条件数量 = 状态变量维度 * 离散点数 + 子时间区间段数 + 边界条件数量 + 路径约束数量 * 离散点数,
- 若终端时间不固定,则需将设计变量个数加 1。
- 将目标函数转化为离散形式;
- 调用 matlab 的
fmincon()求解该 NLP 问题。
算例
该算例选自《最优化与最优控制》第2版第257页例13.1。
设由状态方程及初始条件 $\dot x = -x^2+u$ ,$x_0=10$ ,性能指标 $J(u)=0.5\int_{0}^{1}(x^2+u^2)\text{d}t$ ,求解最优控制使 $J$ 为极小。
代码
这里给出多重打靶法的完整代码。
%--------------------------------------------------------------------------
% This code demonstrates an example of solving constrained optimization problem
% with multiple shooting method.
% Author: Vinh Quang Nguyen - University of Massachusetts, Amherst
%--------------------------------------------------------------------------
% 说明:应用多重打靶法求解无约束最优控制问题
% 例子:《最优化与最优控制》 pp. 257 例13.1
% 类型:无控制约束的最优控制问题
% 时间:2022/07/05
%--------------------------------------------------------------------------
clear;clc;close all;
%% 01 初始参数设置
p.ns = 1; p.nu = 1; % 状态量个数和控制量个数
p.t0 = 0; p.tf = 1; % 初始时间和终止时间
p.x0 = 10; % 初始条件
% 多重打靶法参数设置
p.N = 20; % 打靶点数 => (N-1) 个子时间区段
p.M = 4; % 每个子时间区段包含的打靶点
p.t = linspace(p.t0,p.tf,p.N); % 时间序列
% 设置状态量和控制量的索引
p.x_index = 1:p.N;
p.u_index = p.N+1:2*p.N;
%% 02 求解算法
% 设置初值
y0 = ones((p.ns + p.nu)* p.N, 1);
% 设定求解器设置
options = optimoptions('fmincon','Display','Iter','Algorithm','sqp','MaxFunEvals',1e5);
tic;
[X,fval,exitflag,output] = fmincon(@(y) objfun(y, p),y0,[],[],[],[],[],[],@(y) noncon(y, p),options);
toc;
%% 03 处理数据
p.x = reshape(X(p.x_index), [], p.ns);
p.u = reshape(X(p.u_index), [], p.nu);
%% 04 画图
window_width = 500;
window_height = 416;
% 状态量和控制量
k = 1;
figure('color',[1 1 1],'position',[300+k*window_width,300,window_width,window_height]);
plot(p.t, p.x, 'o-', 'LineWidth',1.5);hold on;
plot(p.t, p.u, 'x-', 'LineWidth',1.5);
xlabel('Time');
ylabel('State & control');
set(gca,'FontSize',15,...
'FontName','Times New Roman',...
'LineWidth',1.5);
legend('$x(t)$','$u(t)$',...
'Location','Northeast',...
'FontSize',10,...
'interpreter','latex');
% 保存数据
% .\ 下一级文件夹
% ..\ 上一级文件夹
% save(['.\','multi_shooting_method.mat']);
%% 子函数
% 目标函数
function f = objfun(y,p)
% 得到状态量和控制量
x = y(p.x_index);
u = y(p.u_index);
L = u.^2/2 + x.^2/2; % 积分项
f = trapz(p.t,L); % 计算目标函数
end
% 状态方程
function dy = state_eq(y,u)
dy = -y^2 + u;
end
% 约束条件
function [c,ceq] = noncon(y,p)
% 得到状态量和控制量
x = reshape(y(p.x_index),[],p.ns);
u = reshape(y(p.u_index),[],p.nu);
% 时间步长
h = p.tf/(p.N-1)/(p.M-1);
% 每次子时间区段进行单次打靶法
states_at_nodes = zeros(p.N, p.ns);
for i = 1:p.N-1
x0 = x(i,:);
u0 = u(i,:);
states = zeros(p.M,p.ns);
states(1,:) = x0;
for j =1:p.M-1
k1 = state_eq(states(j,:), u0);
k2 = state_eq(states(j,:) + h/2 * k1, u0);
k3 = state_eq(states(j,:) + h/2 * k2, u0);
k4 = state_eq(states(j,:) + h * k3, u0);
states(j+1,:) = states(j,:) + h/6*(k1 + 2*k2 + 2*k3 + k4);
end
states_at_nodes(i+1,:) = states(end,:);
end
% 保证各区段起始点的连续性
ceq_temp = x(2:end,:) - states_at_nodes(2:end,:);
% 把初始时刻的状态约束放到 ceq 中
ceq_temp = [ceq_temp; x(1,:) - p.x0];
ceq = reshape(ceq_temp, [], 1);
% 不等式约束
c = [];
end
结果
状态量和控制量的变化曲线如下。
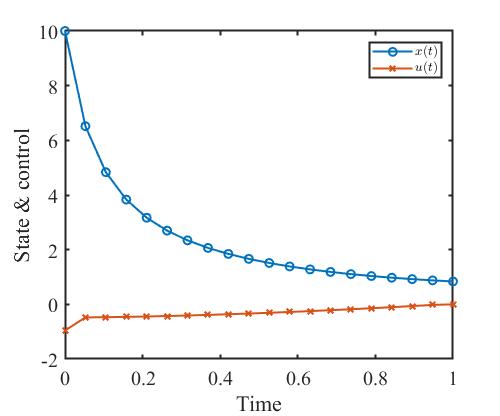
图中第1个点的控制量不太稳定,离其他时间区间控制量的值相差较大,且与打靶法、梯度法初始时刻的控制量值不符,这里我还没完全了解为什么会出现这样的结果。
不过,随着离散点的增多,初始时刻控制量的值会越来越接近真实值。
对比
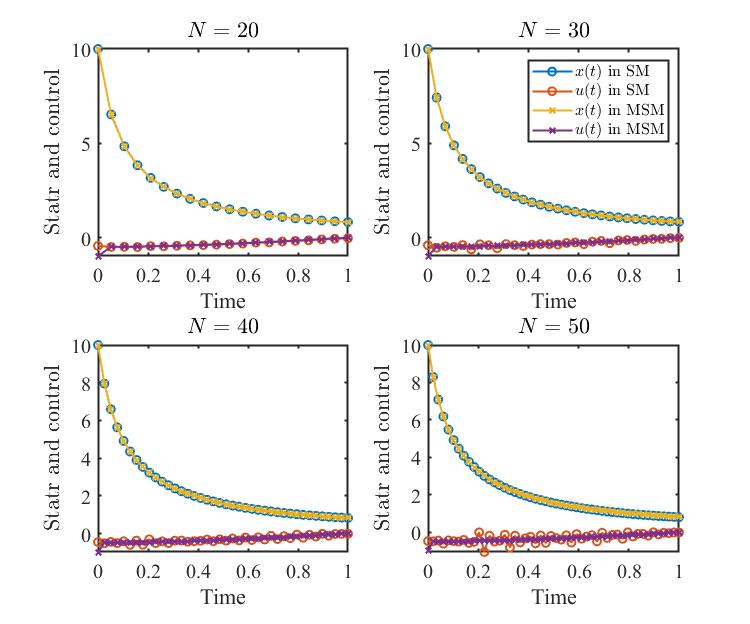
下面对比多重打靶法和单次打靶法的优劣,分别测试20个离散点、30个离散点、40个离散点和50个离散点时的算法效果。
不同离散点数量计算时间的对比。

不同离散点数量状态量和控制量变化曲线的对比。
多重打靶法的计算时间比单次打靶法的计算时间短,因为多重打靶法将子时间区间初始状态变量作为设计变量,纳入 NLP 问题的求解中;单次打靶法没有将状态变量视作设计变量,因此计算目标函数时需要求解微分方程组,求解微分方程组时又需要插值求解控制量 $u(t)$,插值时需要用到 interp1() 函数,interp1() 函数是造成单次打靶法计算时间增加的罪魁祸首。多重打靶法在计算目标函数不需要用到 interp1() ,因此计算时间短。
在状态量和控制量对比图中,可以发现,随着离散点数从20点增加到50点,初始时刻的控制量确实会越来越接近真实值。与单次打靶法对比,多重打靶法的控制量不会随着离散点数的增加而振荡,这也是多重打靶法优于单次打靶法的地方。
思考
通过线性外推的方式平滑初始时刻的控制量
因为初始时刻的控制量与其他时刻的控制量差距太大,我认为可能初始时刻的控制量可用性不高,因此考虑是否可以使用线性外推的方式平滑初始时刻的控制量。
为此,根据公式
\[k = \frac{u_0-u_1}{t_0-t_1} = \frac{u_1-u_2}{t_1-t_2} \\ \Rightarrow u_0 = u_1 + \frac{(u_1-u_2)(t_0-t_1)}{t_1-t_2}\]编写代码,为
%% 03 处理数据
p.x = reshape(X(p.x_index), [], p.ns);
p.u = reshape(X(p.u_index), [], p.nu);
% 尝试平滑第一个时间点的值
u0 = p.u(1+1) + (p.u(1+1)-p.u(2+1))*(p.t(0+1)-p.t(1+1))/(p.t(1+1)-p.t(2+1));
p.u(1) = u0;
得到结果。

可以看见,初始时刻的控制量比没有前的控制量要更加平滑一些了。
对于NLP求解器初值维度的疑问
多重打靶法的代码我是在Multiple shooting method example找到的。作者的代码里,离散点数为30,N=30;状态量维度为2x30,控制量维度为1x29。因为作者认为控制量是每个子时间区段内的控制,一共有29个子时间区段,那么只能有29个控制量。
但是,按照这个思路求解算例问题时遇到了困难。
因为算例的目标函数既包括状态量又包括控制量。状态量和控制量的段数不同,那么后面的运算无法进行;而Multiple shooting method example代码解决的最优控制问题离目标函数只有控制量,所以不存在这个问题。
我猜测作者的代码在本算例中不适用,需要做一些修改。
通过阅读文献,我认为控制量和状态量的子时间区间段数是相等的,所以改写了作者代码,应用到本算例中求解最优控制问题。结果表明可以正常运算,但初始时刻控制量的值存在问题,适用性低。目前还没有想到合理的解决方案,如果有想法解决这个疑问,欢迎通过电子邮箱联系。
我的邮箱是:lordofdapanji@foxmail.com。
谢谢。