数值法求解最优控制问题(二)——打靶法
写在前面
上一篇文章里(数值法求解最优控制问题(一)——梯度法),介绍了使用梯度法求解最优控制问题的原理,并且给出了matlab代码。梯度法具有代码编写简单的优点,但其算法效果受步长的影响较大1。
此外,梯度法需要先依据极大值原理推导一阶最优必要性条件,再通过梯度法求解哈密顿函数值 $H$ ,并且沿着负梯度方向更新控制量 $u$ ,直至满足终止条件。
显然可见,该方法仍然需要进行手动推导,才能进行后面的算法流程。那么有没有连一阶最优性必要条件都不用推导的方法呢?
有的。
叫做直接法。
直接法采用配点思想对原最优控制问题进行离散,离散后的最优控制问题便转化为非线性规划问题(NonLinear Programming,NLP),再选用数值优化方法求解NLP问题,获得原最优控制问题的最优解。
依据配点思路的不同,可以分为:
- 打靶法,特点为仅离散控制变量;
- 配点法,特点为同时离散状态变量和控制变量。
本篇文章先介绍打靶法中的单步直接打靶法(Direct Single Step Shooting Method,DSSSM。后文简称打靶法)。
打靶法
这里先介绍打靶法的基本原理,并按照数值法求解最优控制问题(一)——梯度法的算例,给出matlab代码。
打靶法在时域上离散控制变量将其转化为NLP问题进行求解,该方法以离散时间点上的控制变量为设计变量,时间节点之间的控制变量可通过插值得到。
离散过程的数学描述为:
\[\begin{aligned} t_0 &= t_1 < t_2 < \dots < t_N = t_f, \\ \boldsymbol{y} &= (\boldsymbol{u}_1, \boldsymbol{u}_2, \dots, \boldsymbol{u}_N), \\ u_k(t) &= \varphi_u(t, u_{k1}, u_{k2}, \dots, u_kp) \quad k = 1, 2, \dots, m, \\ u_k(t) &= u_{k(i)} + \frac{u_{k(i)}-u_{k(i-1)}}{t_i-t_{i-1}}(t-t_{i-1} \quad t_{i-1} \le t \le t_i). \end{aligned}\]式中,$N$ 为离散时间区间段数,$m$ 为控制量的维度。
在数值法求解最优控制问题(〇)——定义给出了最优控制问题的四大组成部分,即
- 性能指标;
- 控制系统微分方程约束;
- 边界约束;
- 路径约束。
下面给出四部分的转化过程。
性能指标转化过程
对于性能指标
\[J = \Phi (\mathbf{x}(t_0),t_0,\mathbf{x}(t_f),t_f) + \int_{t_0}^{t_f} L(\mathbf{x}(t),\mathbf{u}(t),d) \text{d}t\]将其分为Mayer型和Lagrange型性能指标讨论。
对于Mayer型性能指标
\[\Phi (\mathbf{x}(t_0),t_0,\mathbf{x}(t_f),t_f),\]根据 $\boldsymbol{x}(t)=g(u(t),t)$ ,可将其转化为
\[JB (u(t),t_0,t_f),\]对于Lagrange型性能指标
\[\int_{t_0}^{t_f} L(\mathbf{x}(t),\mathbf{u}(t),d) \text{d}t\]根据辛普森积分,可将其转化为
\[JL(u(t),t),\]综上所述,性能指标可转化为
\[JB (u(t),t_0,t_f) + JL(u(t),t).\]控制系统微分方程约束转化过程
控制系统微分方程约束为:
\[\boldsymbol{\dot x}(t) = \boldsymbol{f}(\boldsymbol{x}(t),\boldsymbol{u}(t),t).\]离散后的控制变量作为设计变量,可认为是已知量,因此可根据上述控制系统微分方程约束求解处状态变量 $\boldsymbol{x}(t)$,即
\[\boldsymbol{x}(t) = g(u(t),t),\]求解得到的 $\boldsymbol{x}(t)$ 是关于 $(\boldsymbol{u}(t),t)$ 的函数。
边界约束转化过程
边界约束为:
\[\phi (\boldsymbol{x}(t_0),t_0,\boldsymbol{x}(t_f),t_f) = 0.\]因为 $\boldsymbol{x}(t_0), \boldsymbol{x}(t_f)$ 都是关于 $(\boldsymbol{u}(t),t)$ 的函数,代入上式替换后可表示为:
\[CB(u(t),t_0,t_f) = 0.\]注:$C$ 为constraints的缩写,代表约束;$B$ 为boundary的缩写,代表边界。
路径约束转化过程
路径约束为:
\[\mathbf{C}(\mathbf{x}(t),\mathbf{u}(t),t) \le 0.\]根据 $\boldsymbol{x}(t)=g(u(t),t)$ ,可将其转化为
\[CP(u(t),t) = 0.\]此时,已把最优控制问题转化为NLP。K.L.Teo2指出,当离散点趋向无穷多时,该NLP问题的解与最优控制问题的解等价。
算法步骤
- 确定最优控制问题的离散点数、起止时间、状态变量初值、控制变量初值;
- 计算控制变量数量和约束条件数量:
- 控制变量数量 = 控制变量维度 * 离散点数,
- 约束条件数量 = 状态变量维度 * 离散点数 + 边界条件数量 + 路径约束数量 * 离散点数,
- 若终端时间不固定,则需将设计变量个数加 1。
- 将目标函数转化为离散形式;
- 调用 matlab 的
fmincon()求解该 NLP 问题。
算例
该算例选自《最优化与最优控制》第2版第257页例13.1。
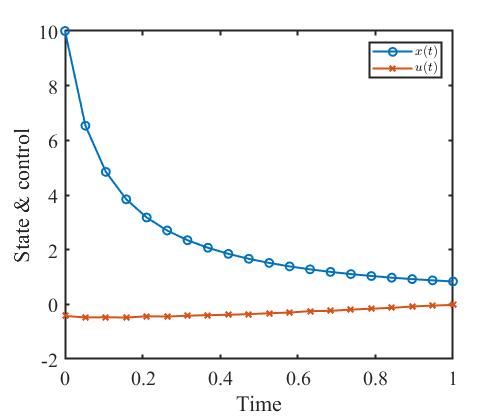
设由状态方程及初始条件 $\dot x = -x^2+u$ ,$x_0=10$ ,性能指标 $J(u)=0.5\int_{0}^{1}(x^2+u^2)\text{d}t$ ,求解最优控制使 $J$ 为极小。
代码
打靶法原理十分简单,在这里直接给出完整代码,可以从代码中学习打靶法的原理。
%--------------------------------------------------------------------------
% 说明:应用直接打靶法求解无约束最优控制问题
% 例子:《最优化与最优控制》 pp. 257 例13.1
% 类型:无控制约束的最优控制问题
% 时间:2022/07/01
%--------------------------------------------------------------------------
clear;clc;close all;
%% 01 初始参数设置
p.ns = 1; p.nu = 1; % 状态量个数和控制量个数
p.t0 = 0; p.tf = 1; % 初始时间和终止时间
p.x0 = 10; % 初始条件
% 直接打靶法参数设置
p.nt = 20; % 打靶点参数设置
p.t = linspace(p.t0,p.tf,p.nt)'; % 时间区间
% 将控制量离散
p.u_index = 1:p.nt;
%% 02 求解算法
% 给控制量赋初值
p.u = -0.5*ones(p.nt,1);
u0 = p.u; % 控制量的初值猜测
% 求解控制量
options = optimoptions(@fmincon,'display','iter','MaxFunEvals',1e5,'algorithm','sqp');
tic;
[u,fval,exitflag,output] = fmincon(@(u) objective(u,p),u0,[],[],[],[],[],[],[],options);
toc;
p.u = u;
time_record = toc;
% 再进行一次仿真得到数据
[~,Y] = ode45(@(t,y) derivative(t,y,p),p.t,p.x0);
p.x = Y(:,1);
%% 画图
k = 0;
window_width = 500;
window_height = 416;
% 状态量
fig.k = 0;
figure('color',[1 1 1],'position',[300+k*window_width,300,window_width,window_height]);
plot(p.t, p.x, 'x-', 'LineWidth',1.5);hold on;
plot(p.t, p.u, 'x-', 'LineWidth',1.5);
xlabel('Time');
ylabel('State & control');
set(gca,'FontSize',15,...
'FontName','Times New Roman',...
'LineWidth',1.5);
legend('$x(t)$','$u(t)$',...
'Location','Northeast',...
'FontSize',10,...
'interpreter','latex');
% 保存数据
% .\ 下一级文件夹
% ..\ 上一级文件夹
% save(['..\','shooting_method.mat']);
%% 子函数部分
% 目标函数
function f = objective(u_obj,p)
p.u = u_obj(p.u_index);
[~,Y] = ode45(@(t,y) derivative(t,y,p),p.t,p.x0); % 仿真得到时序状态量
x = Y; % 状态量
u = u_obj(p.u_index); % 控制量
L = u.^2/2 + x.^2/2; % 积分项
f = trapz(p.t,L); % 计算目标函数
end
% 状态方程
function dy = derivative(t,y,p)
% 使用 interp1qr() 进行插值
% u = interp1qr(p.t,p.u,t);
% 使用 interp1q() 函数进行插值
% 发现 interp1q() 的速度比 interp1() 快,和nterp1qr() 速度一样
u = interp1q(p.t,p.u,t);
% 使用 interp1() 函数进行插值
% u = interp1(p.t,p.u,t);
dy = -y^2 + u;
end
结果
状态量和控制量的变化曲线如下。
对比
不同插值函数对计算时长的影响
使用打靶法时,计算时长比梯度法慢。
我的笔记本电脑参数为:
- 型号:联想 Thinkpad T490
- 处理器:Intel(R) Core(TM) i5-8265U CPU @ 1.60GHz x86
- 内存: DD4R 2400 MHz 8GB + DD4R 2667 MHz 8GB
- 电源模式:平衡模式
在笔记本上运行代码,梯度法的计算时长为 0.1163 秒,打靶法的计算时长为 1.3632 秒。
打靶法的计算时长是梯度法的 11.7214 倍。
查看 matlab 的运行用时分析,了解到是插值函数 interp1() 占用了绝大部分用时。为了减少打靶法的计算时间,可以对 interp1() 进行优化,或选用消耗更少的插值函数。
matlab中有个 interp1q() 函数,但目前 mathwork 已不推荐使用该函数。不过用它进行插值的速度十分快,这个函数是一种快速一维插值方法,运行速度比 interp1() 更快,但因为提供的插值方式少,且代码编写年代久远,所以已经不推荐使用该函数。不过在本算例中还是可以继续发挥作用的。
关于为什么 interp1() 函数计算时间长的问题,MATLAB一维插值加快运行速度的方法给出了介绍。
interp1(Xvec,Vvec,xq,method) 对于 Xvec 在 xq 中的插值处理,是将 Xvec 从前至后排列好,再依次比较大小,最后定位到特定的时间区段内。
用伪代码来表示,即:
for i = 1:length(Xvec) - 1
if xq < Xvec(i) && xq > Xvec(i+1)
在 [Xvec(i), Xvec(i+1)] 区间内线性插值
else
继续比较大小,定位 xq 的位置,确定使用哪一段的 [Xvec(i), Xvec(i+1)] 区间
end
end
在 mathwork 的 file exchange 里找到了另外一个插值函数 interp1qr() ,Quicker 1D linear interpolation: interp1qr。
作者在介绍里面说,
It runs at least 3x faster than ‘interp1q’ and 8x faster than ‘interp1’, and more than 10x faster as m=length(x) increases (see attached performance graph).
大意为 interp1qr() 的运行效率比 interp1q() 快3倍,比 interp1qr() 快10倍。
下面对比 interp1() 、interp1q() 和 interp1qr() 三个函数的打靶法计算时长。
仿真结果如下。
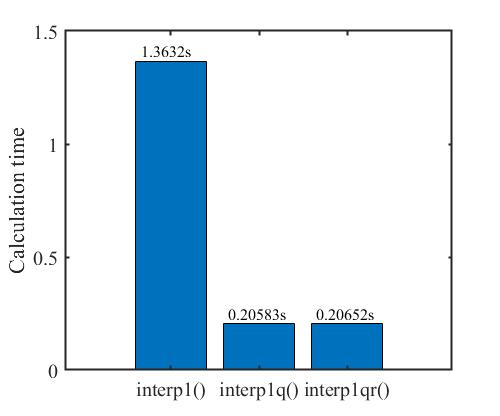
状态量和控制量的变化曲线基本一样,为避免累赘,这里不再放仿真图。
interp1q() 和 interp1qr() 的计算时长基本一致,没有如同作者说的 It runs at least 3x faster than ‘interp1q’ ,原因或许是算例问题比较简单,没有发挥出来 interp1qr() 的优势,在后面的学习过程中说不定会有新的体会和发现。interp1() 的计算时长最长,因为它在使用过程中进行了很多检查工作,但这些检查工作其实没有必要,写代码的时候已经检查过一遍了,出错几率低。调用次数少的时候,检查一下没有关系,但调用次数多了之后,每回都要检查,这无疑加重了计算机的负担;另外,interp1() 的插值方式存在缺陷,这又是导致计算时间长的原因。
通过这次对比仿真,可以得出结论,在使用较为简单的插值场景中,可以选用 interp1q() 和 interp1qr() 函数来降低计算消耗,减少计算时间。
不同离散点数对计算时长的影响
这里给出离散点数为20点、30点、40点、50点时的仿真结果。
不同离散点数对应的计算时长为:
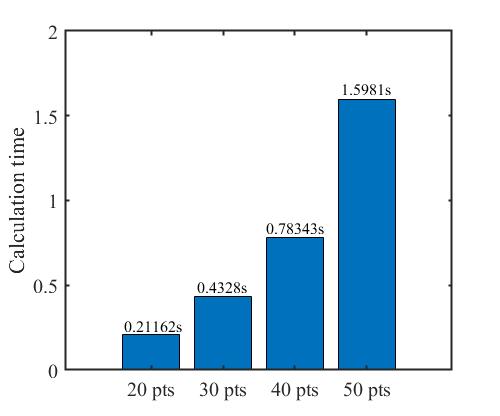
注:pts 为点数(points)之意。
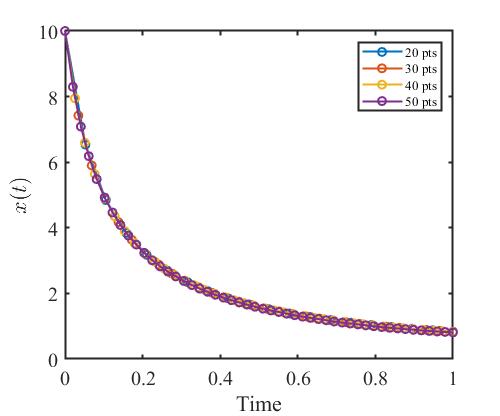
不同离散点数对应的状态量变化曲线为:
不同离散点数对应的控制量变化曲线为:
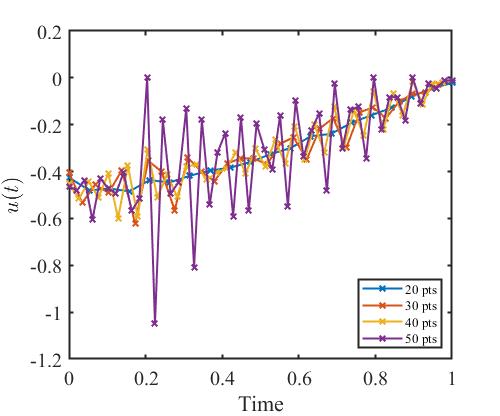
可以看出,离散点越多,计算时长越长。
不同离散点数对应的状态量没有区别。
但是离散点越多,控制量变化越大,点与点之间的连接线十分陡峭,这在现实中是不可用的。
对比仿真结果,可以发现,选择20个离散点已经具有很好的效果,再添加离散点数反而会让算法效果更差,计算时间更长,因此在打靶法中离散点数的选择是十分重要的。