用matlab的bvpc求解器解决最优控制问题(即两点边值问题)
今天看matlab数学文档的时候,发现可以使用bvp4c和bvp5c这两个求解器解决两点边值问题(Boundary Value Problem, BVP),上网搜了一下,发现CSDN上有人用bvp4c解决了一个最优控制问题,下面是对他的博客的个人理解。
【理论】
bvp4c函数用于数值求解两点边值问题,作为Matlab中对ode系列函数的补充。ode系列函数只能数值求解具有初值的常微分方程。
调用格式为
sol = bvp4c(@odefun, @bcfun, solinit, options, p1, p2, ...)
(1)odefun 为微分方程的函数句柄,调用格式为
function dydx = odefun(x, y, p1, p2, ...)
其中,x 为标量,y 是列向量,p1 和 p2 以及剩下的参数是在主函数中和 x 、y 有关的系数。odefun(x, y)必须返回列向量 dydx ,表示 $f(x,y)$。
(2)bcfun 为微分方程的边界条件句柄,调用格式为
function res = bcfun(ya, yb, p1, p2, ...)
其中,ya 为初值,yb 是终值,均为列向量,p1 和 p2 以及剩下的参数是在主函数中和 x 、y 有关的系数,res 为输出,是列向量。需要注意的是,若在实际问题中,$ya(t_0)$的值为$a$,即$ya(t_0)=a$,则在函数中应写成ya - a,yb也是一样。
(3)solinit 为初始估计解的结构体。使用bvpinit函数创建,调用格式为
solinit = bvpinit(x, y)
其中,x 向量为初始网格的排序节点,应满足边界条件a=solinit.x(1)和b=solinit.x(end)。y 是为初始估计解,使得solinit.y(:,i)为在solinit.x(i)节点处的初始估计解。以常值作为初始猜测值,此处初值可以任意设置,若任意设置的初值无法解算出合理结果,则可考虑使用continuation方法设置初值,可参考这篇文章。
(4)options 为可选积分参数。使用bvpset函数创建,调用格式为
options = bvpset('name1','para1','name2','para2',...)
一般情况可用[]代替。
(5)输出sol为结构体,为特定数量点对应的解,其所包含的字段如下表所示。为使曲线变得更光滑,需要在中间插入一些点,使用deval函数,sxint=deval(sol,xint), 其中,xint为点向量,函数deval根据这些点向量求解。sol为函数bvp4c的输出。
| 参数 | 功能 |
|---|---|
| sol.x | Bvp4c 选择的网格 |
| sol.y | sol.x 网格点处y(x)的近似值 |
| sol.yp | sol.x 网格点处y’(x)的近似值 |
| sol.parameters | bvp4c 针对未知参数返回的值(如果有) |
| sol.solver | ‘bvp4c’ |
| sol.stats | 计算成本统计信息(当设置stats选项和bvpset时,会显示此信息) |
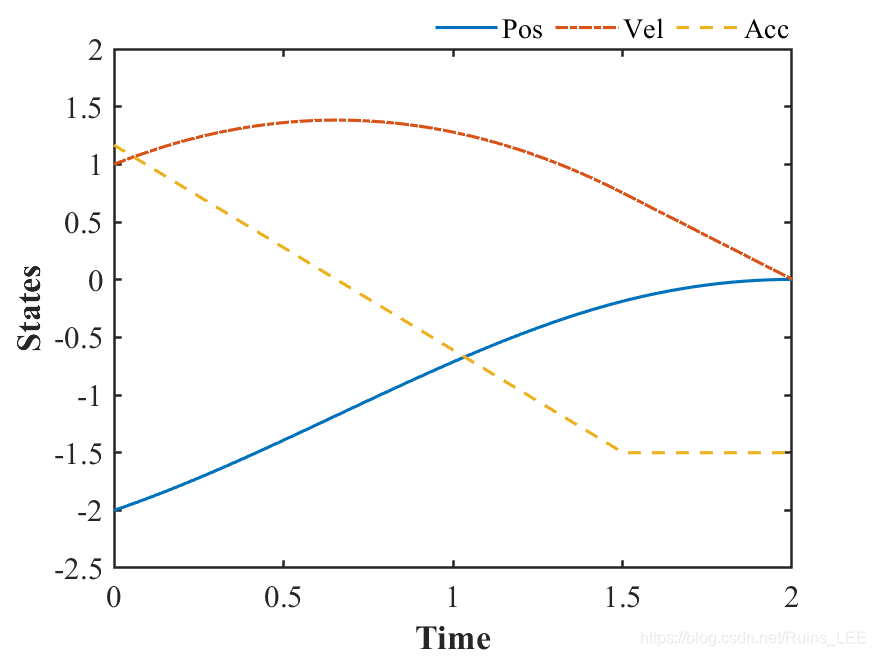
【例题】求解最优控制问题-有约束的停车能耗最优控制
初始时刻车辆位置为$x_1(0)=-2$,速度为$x_2(0)=1$,状态方程为
\[\left\{\begin{matrix} \begin{aligned} \dot x_1(t) &= x_2(t) \\ \dot x_2(t) &= u(t) \end{aligned} \end{matrix}\right.\]容许控制为
\[\left | u \right | \le M_1 =1.5\]终止条件为
\[x_1(t_f)=0,\ x_2(t_f)=0,\ t_f=2\]要最小化的性能指标为总能耗,其表达式为
\[J(u)=\int_{t_0}^{t_f}\frac{1}{2}u^2(t)\mathrm dt\]【解】
【代码】
%% 主函数
function main_Optimalcpntrol
clc;close all;
T = 2; N = 1000; dt = T/N; M = 1.5;
solinit = bvpinit(linspace(0, T, N), [0 0 0.5 0.5]);
options = bvpset('Stats','on','RelTol',1e-1);
sol = bvp4c(@BVP_ode,@BVP_bc,solinit,options);
t = sol.x;
y = sol.y;
%% 最小化性能指标
X(1,:)=[-2;1];
J=0;
% 此处计算性能指标,将其离散化再计算,值得学习
for k=1:N-1
% 此处的 if 程序即《最优控制:数学理论与智能方法(上册)》 pp 209 式(4.2.29)
if y(4,k)>M % y(4,:)是协态变量p2(t),那么y(3,:)是协态变量p1(t)
U = -M;
elseif y(4,k)<-M
U = M;
else
U = -y(4,k);
end
X(k+1,2) = X(k,2) + dt*U;
u(1,k) = (X(k+1,2)-X(k,2)) / dt;
X(k+1,1) = X(k,1) + dt*X(k,2);
r = dt * 0.5 * U^2;
J = J+r;
end
%% 画图
figure('Color',[1,1,1]);
plot(linspace(0,T,N), X(:,1), '-','LineWidth',1.5);hold on;
plot(linspace(0,T,N), X(:,2), '-.','LineWidth',1.5);
plot(linspace(0,T,999),u,'--','LineWidth',1.5);
axis([0 2 -2.5 2]);
xlabel('Time',...
'FontWeight','bold');
ylabel('States',...
'FontWeight','bold');
legend('Pos','Vel','Acc',...
'LineWidth',1,...
'EdgeColor',[1,1,1],...
'Orientation','horizontal',...
'Position',[0.5,0.93,0.40,0.055]);
set(gca,'FontName','Times New Roman',...
'FontSize',15,...
'LineWidth',1.2);
% 'YTick',[-2.5:1:2.1]);
saveas(gcf,'fg1.png');
end
%% 微分方程组
function dydt = BVP_ode(t,y)
M = 1.5;
% 用这行代码更好理解
% 此处的 if 程序即《最优控制:数学理论与智能方法(上册)》 pp 209 式(4.2.29)
if y(4)>M % y(4,:)是协态变量p2(t),那么y(3,:)是协态变量p1(t)
u = -M;
elseif y(4)<-M
u = M;
else
u = -y(4);
end
% u = -y(4);
% u = max(-M,u);
% u = min(M,u);
dydt = [y(2)
u
0
-y(3)];
end
%% 边界条件函数
function res = BVP_bc(ya,yb)
res = [ya(1) + 2
ya(2) - 1
yb(1)
yb(2)];
end
仿真结果如下
【参考文献】
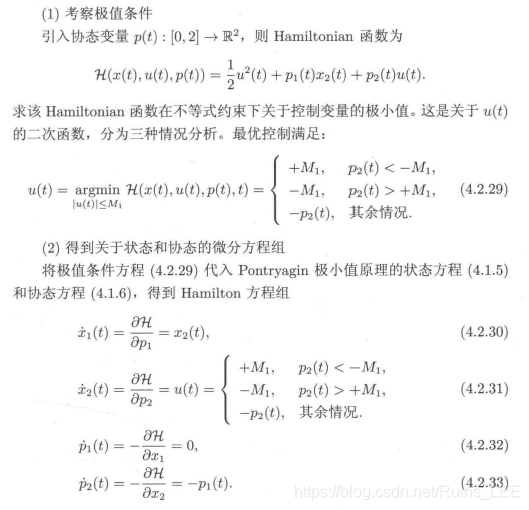
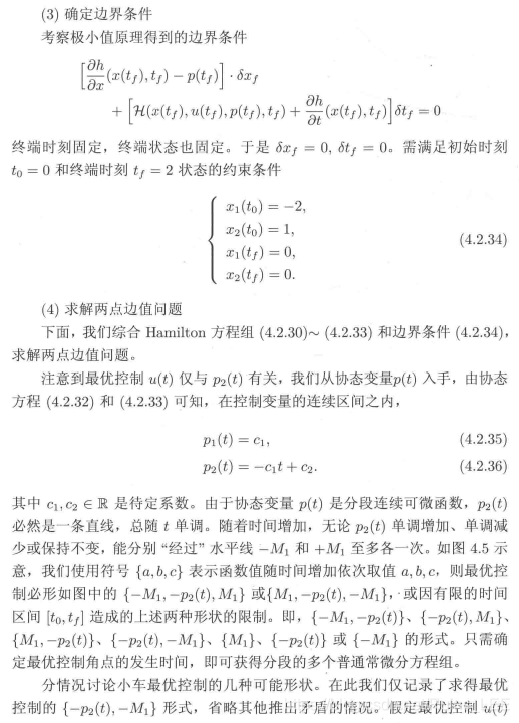
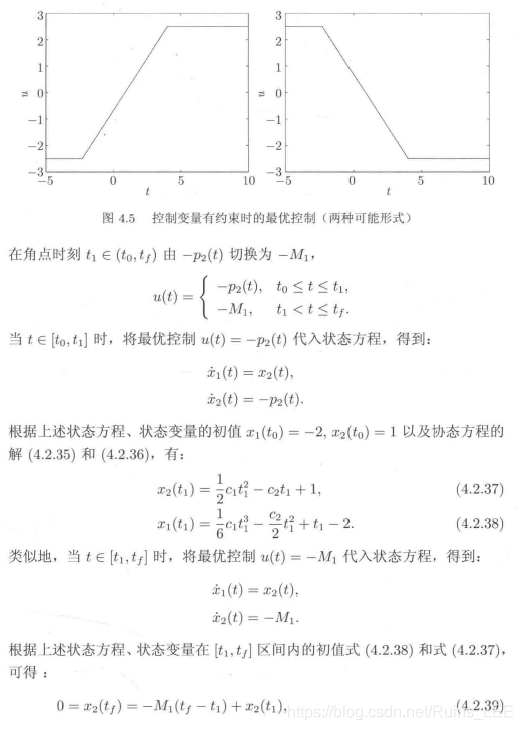
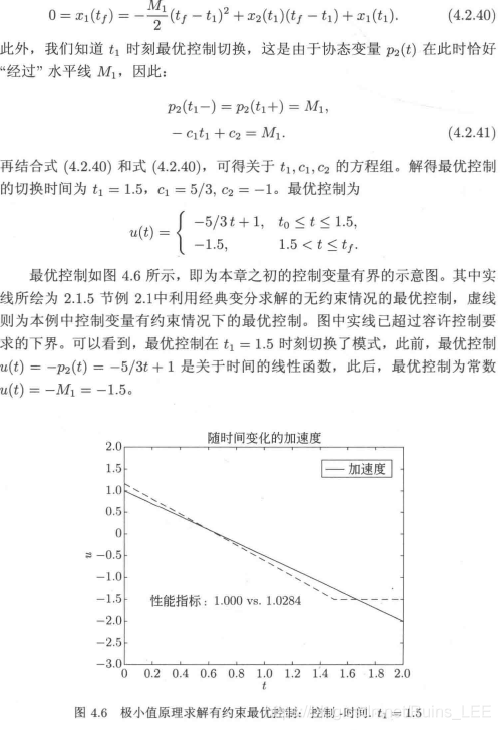
[1] Jie Zhang, Fei-Yue Wang. 最优控制:数学理论与智能方法(上册)[M]. 2017. pp 206-213.
[2] lynn156. 两点边值问题求解—bvp4c函数[OL]. https://blog.csdn.net/lynn15600693998/article/details/86603731 2019-01-23.
[3] 瞿立建. 用Matlab bvp4c 解带未知参数的常微分方程边值问题,怎么给出合适的初值?[OL]. http://www.joyfulphysics.net/index.php/archives/189/ 2018-05-23